There are three main types of simple harmonic
motion:
(a) free oscillations – simple harmonic motion with a constant amplitude and period
and no external influences
(b) damped oscillations – simple harmonic motion but with a
decreasing amplitude and varying period due to external or internal damping forces
(c)
forced oscillations – simple harmonic motion but driven externally
The amplitude remains constant as time passes, there is no damping. This type of oscillation will only occur in theory since in practice there will always be some damping. The displacement will follow the formula x = r sinwt where r is the amplitude. It is these types of oscillation that we have looked at already.
Addition of free simple harmonic
motions
It is interesting to look at the superposition of two simple harmonic motions,
such as a pendulum that is set swinging and then pushed sideways at an angle to its original
motion. However to see the motion clearly it is best done on the oscilloscope or using a
computer. You can also show this motion quite easily by using a can with a hole in the bottom
and full of sand as the pendulum "bob". As the can swings they sand dribbles out tracing a
pattern of the motion on the floor below.
(i) If two simple harmonic motions act along
the same direction with the same frequency, then their resultant is a simple harmonic motion
with the same frequency along that line. The amplitude will be constant but will depend on the
phase difference between the two simple harmonic motions. For example if the driving forces
were p out of step there would be no motion at all. A phase difference of p means that one
driving force would be trying to move the object in one direction while the other would be trying
to move it in exactly the opposite direction – they would cancel and so the net result would be
no motion.
(ii) If their frequencies are different but they still act along the same line then beats will be
produced, the variation in amplitude depending on the difference in frequency. You will be able to find out about
beats in more detail in the section on wave motion. Simply, they give rise to the warbling sound that you get if two
instruments that are slightly out of tune compared to each other are played together. The closer the two frequencies
come the smaller is the beat frequency and when they are exactly in tune the beat frequency is zero and the effect
disappears.
(iii) If they act in perpendicular directions there are two sets of
possibilities:
1. The frequencies are the same and of equal amplitude:
a phase difference 0
gives a straight line, a phase difference of p/2 gives a circle, and a phase difference of p gives
zero oscillation.
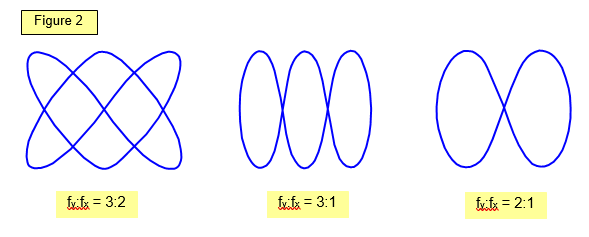
2. The frequencies are different but of equal amplitude:
this gives
Lissajous figures, three examples of which are shown in the accompanying diagram. for a
phase difference of p/2. The numbers of loops in the x and y directions can be counted, and this
will give the frequency ratio of the two s.h.m.s:
These are
oscillations where energy is taken from the system and so the amplitude decays. They may be
of two types:
(i) Natural damping, examples of which are:
internal forces in a
spring,
fluids exerting a viscous drag.
(ii) Artificial damping, examples of which
are:
electromagnetic damping in galvanometers, the coating of panels in cars to reduce
vibrations, shock absorbers in cars, interference damping - gun mountings on
ships.
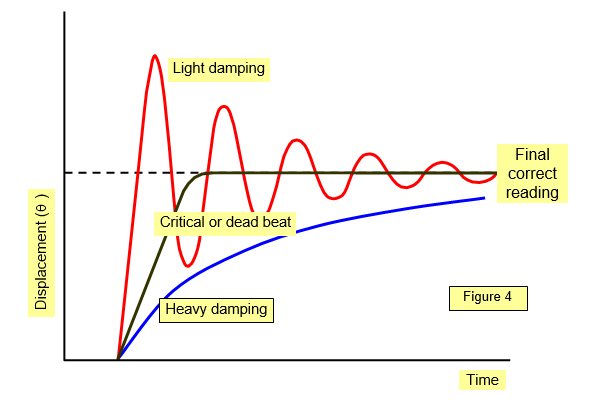
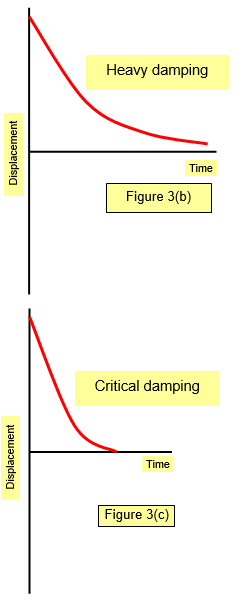
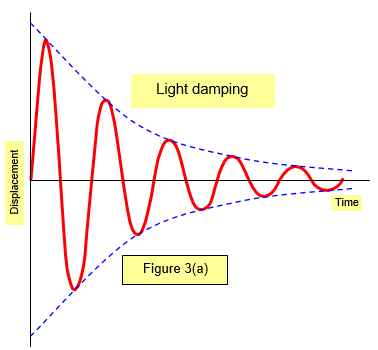
Artificial damping can be light, in which case the system oscillates about the midpoint
(Figure 3(a)), heavy, in which the system takes a long time to reach equilibrium (Figure 3(b)) or
critical, where the system reaches equilibrium in a short time compared with T with no overshoot
where T is the natural period of vibration of the system (Figure 3(c)).
A good example of damping can be seen in the moving coil
galvanometer. Electromagnetic damping is used here: the coil moves in a magnetic field and the
current flowing in it can be shorted with a resistor, thus varying the damping. The system is
either
(i) dead beat — that is, critically damped, or
(ii) ballistic — the damping is as
small as possible.
With reasonably light damping the period is unchanged but as the
damping is increased the time period is increased and the oscillations die away more
rapidly.
Damping is also important in a weighing machine (balance) such as in a shop or a checkout at a supermarket where a true reading of the mass of an object placed on the scale pan is needed quickly. If the damping was light and the pan oscillated you could clearly get a bargain by choosing to pay when the reading was low. If the damping was heavy you would obviously have to wait a long time before the true reading was reached. Some possible variations of reading (displacement from the final correct reading) are shown in Figure 4)